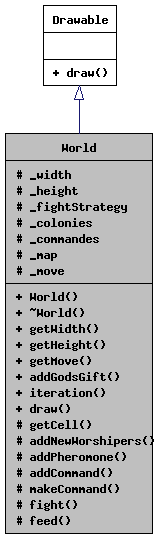
#include <World.h>
Public Member Functions | |
| World (unsigned int width, unsigned int height, unsigned int nb_colonies) | |
| Constructor. | |
| virtual | ~World () |
| Empty Destructor. | |
| unsigned int | getWidth () |
| Get the World width. | |
| unsigned int | getHeight () |
| Get the World height. | |
| Move * | getMove () const |
| Get the move responsability chain. | |
| void | addGodsGift (unsigned int i, unsigned int j) |
| Add a food gift from Gods. | |
| void | iteration () |
| Make the main iteration. | |
| virtual void | draw () |
| Draw the World content with OpenGL. | |
Protected Member Functions | |
| Cell *& | getCell (unsigned int i, unsigned int j) |
| Get one Cell of the World. | |
| void | addNewWorshipers () |
| Add the new Worshipers created by the Colonies to the World. | |
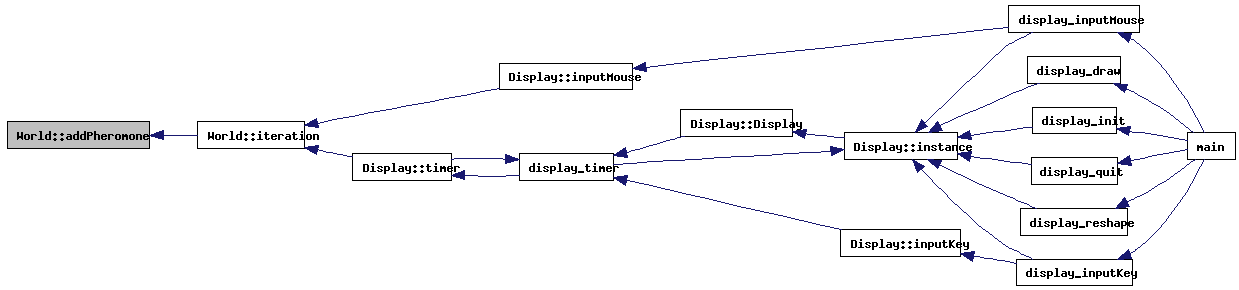
| void | addPheromone (Cell *cell, Worshiper *w) |
| Add some Pheromones to a Cell. | |
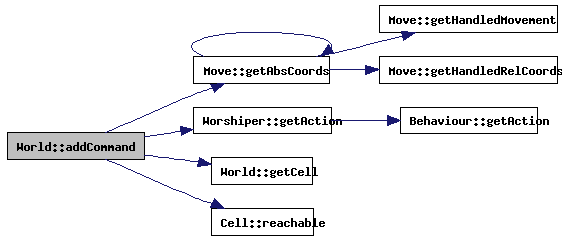
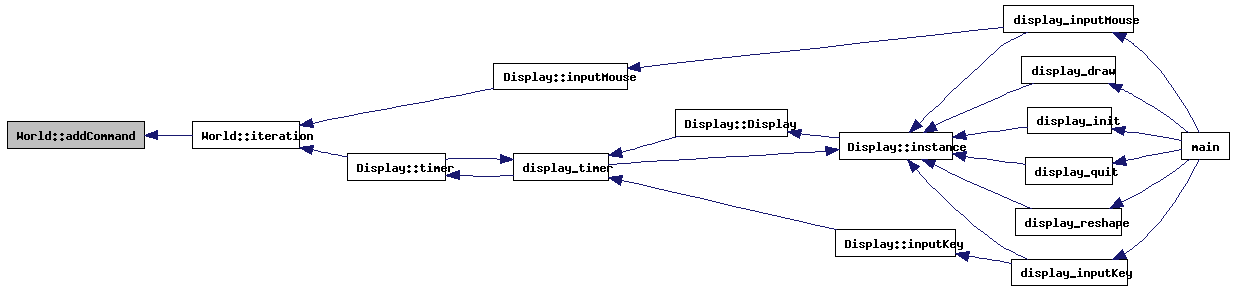
| void | addCommand (Worshiper *w, unsigned int i, unsigned int j) |
| Add a move command. | |
| void | makeCommand () |
| Execute the move commands. | |
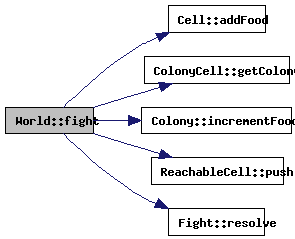
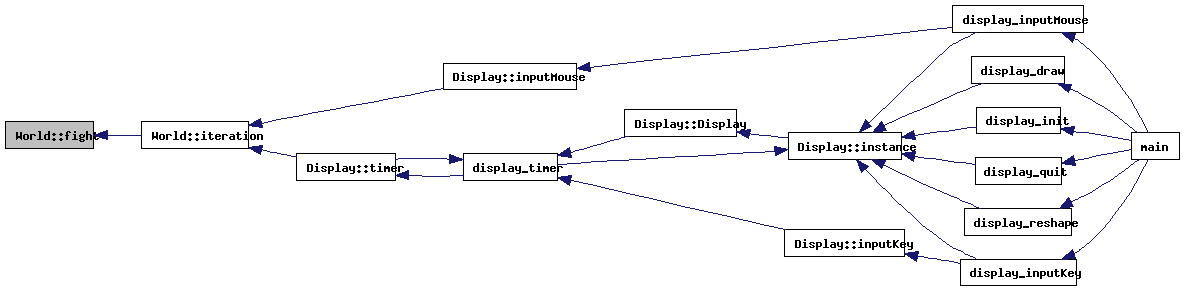
| Cell * | fight (Cell *cell) |
| Do all the fights on a Cell. | |
| void | feed (Cell *cell) |
| Feed the Worshipers of a Cell. | |
Protected Attributes | |
| unsigned int | _width |
| unsigned int | _height |
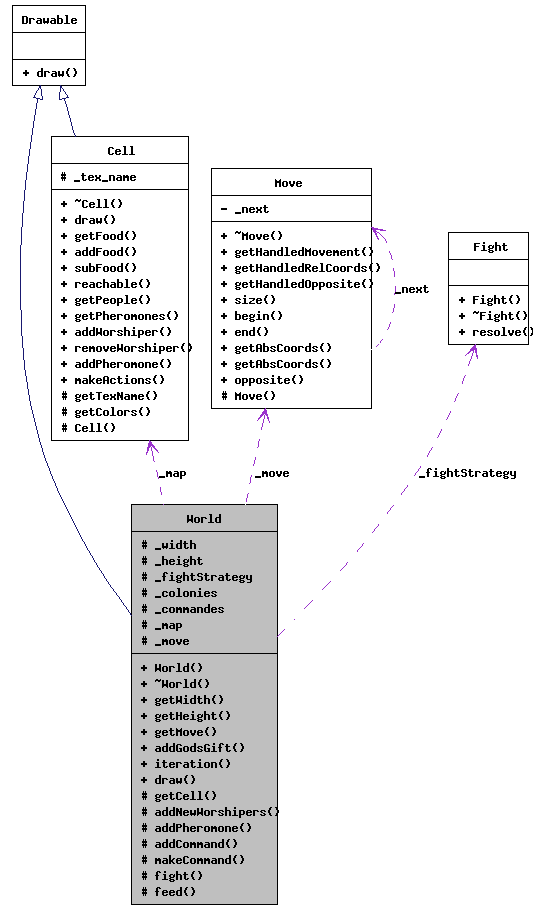
| Fight * | _fightStrategy |
| std::vector< Colony * > | _colonies |
| std::map< Worshiper *, coord_t > | _commandes |
| Cell ** | _map |
| Move * | _move |
Friends | |
| class | VisualContext |
Definition at line 43 of file World.h.
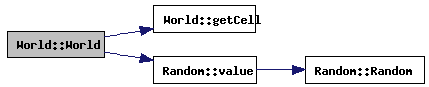
| World::World | ( | unsigned int | width, | |
| unsigned int | height, | |||
| unsigned int | nb_colonies | |||
| ) |
Constructor.
| width | the width of the World to create | |
| height | the height of the World to create | |
| nb_colonies | the number of Colonies to create |
Definition at line 238 of file World.cpp.
References _colonies, _fightStrategy, _height, _map, _move, _width, CORRIDOR_SIZE_MAX, getCell(), j, MAX_FOOD_CAPACITY, and Random::value().
00238 : 00239 _width(width), _height(height), _colonies(nb_colonies) { 00240 unsigned int max; 00241 int i, j, n = 0; 00242 00243 // TODO Initialisation + propre des colonies 00244 for(int i = 0; i < nb_colonies; i++){ 00245 _colonies[i] = new Colony(MAX_FOOD_CAPACITY * 30, new GeneticReplication); 00246 } 00247 00248 _map = new Cell*[_width * _height]; 00249 for(i = 0; i < _height; i++) { 00250 for(j = 0; j < _width; j++) { 00251 if(i == 0 || i == _height - 1 || j == 0 || j == _width - 1) { 00252 // on s'assure que tous les bords sont bien des murs 00253 getCell(i, j) = new WallCell; 00254 } else { 00255 /*if((i + j) % 8 == 0) { 00256 getCell(i, j) = new WallCell; 00257 } else { 00258 max = MAX_FOOD_CAPACITY + 1; 00259 getCell(i, j) = new EmptyCell; 00260 } 00261 */ 00262 // une case sur deux sera vide par défaut en moyenne 00263 switch(Random::value() % 10) { 00264 case 0: 00265 getCell(i, j) = new ColonyCell(_colonies[n++ % _colonies.size()], i, j); 00266 break; 00267 case 1: 00268 // il doit toujours y avoir au moins un peu de nouriture 00269 // et le taux de régénération doit être inférieur à la capacité 00270 max = (Random::value() % MAX_FOOD_CAPACITY) + 1; 00271 getCell(i, j) = new RenewableFood(max, (Random::value() % max) + 1); 00272 break; 00273 case 2: 00274 // il doit toujours y avoir au moins un peu de nouriture 00275 getCell(i, j) = new InfiniteFood((Random::value() % MAX_FOOD_CAPACITY) + 1); 00276 break; 00277 case 3: 00278 // attention, un couloir doit toujours rester traversable... 00279 getCell(i, j) = new CorridorCell((Random::value() % CORRIDOR_SIZE_MAX) + 1); 00280 break; 00281 case 4: 00282 getCell(i, j) = new WallCell; 00283 break; 00284 default: 00285 getCell(i, j) = new EmptyCell; 00286 } 00287 } 00288 } 00289 } 00290 delete getCell(7, 7); 00291 getCell(7, 7) = new ColonyCell(_colonies[0], 7, 7); 00292 delete getCell(8, 8); 00293 getCell(8, 8) = new ColonyCell(_colonies[1], 8, 8); 00294 00295 _fightStrategy = new UntilVictoryFight; 00296 00297 //Chaîne de responsabilité pour les actions de déplacement 00298 _move = new NoMove( 00299 new NorthMove( 00300 new SouthMove( 00301 new WestMove( 00302 new EastMove( 00303 new NorthWestMove( 00304 new NorthEastMove( 00305 new SouthEastMove( 00306 new SouthWestMove(NULL) 00307 ) 00308 ) 00309 ) 00310 ) 00311 ) 00312 ) 00313 ) 00314 ); 00315 }
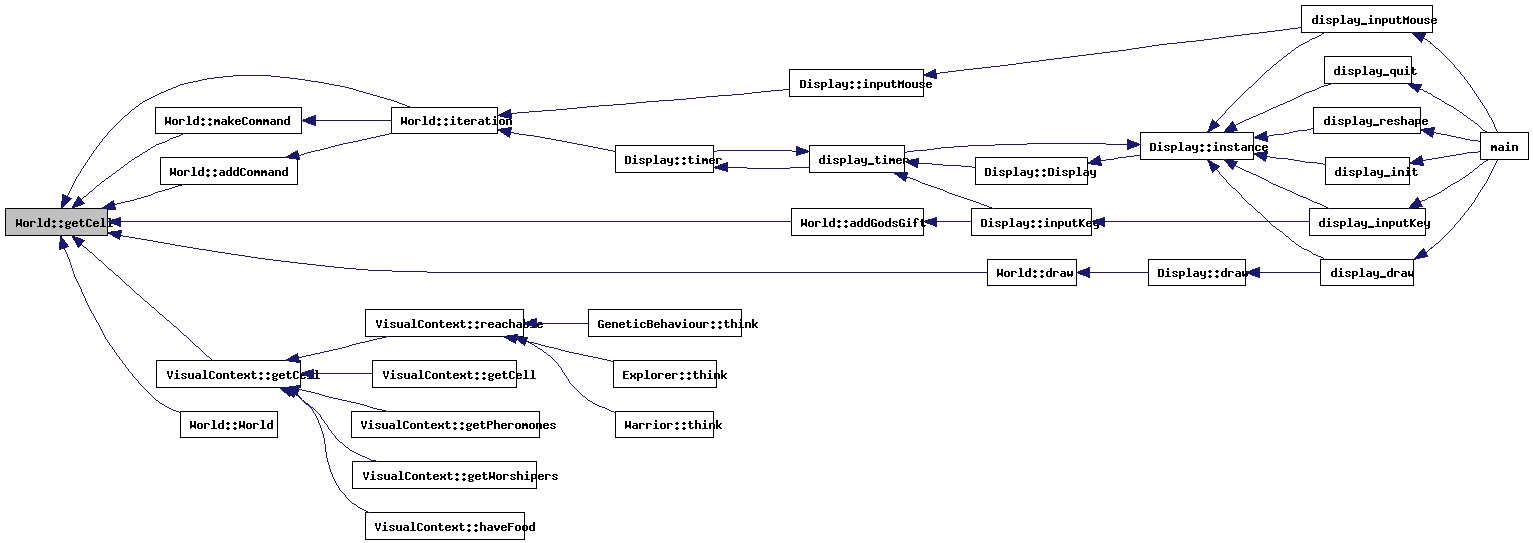
| Cell*& World::getCell | ( | unsigned int | i, | |
| unsigned int | j | |||
| ) | [inline, protected] |
Definition at line 78 of file World.h.
Referenced by addCommand(), addGodsGift(), draw(), VisualContext::getCell(), iteration(), makeCommand(), and World().
Add some Pheromones to a Cell.
Definition at line 91 of file World.cpp.
References Cell::addPheromone(), and Worshiper::getPheromones().
Referenced by iteration().
00091 { 00092 std::list<Pheromone*>::iterator it, end; 00093 std::list<Pheromone*> *pheromones = NULL; 00094 00095 // on récupère les phéromones a créer par l'individu 00096 pheromones = w->getPheromones(); 00097 if(pheromones != NULL) { 00098 end = pheromones->end(); 00099 // et on ajoute chacune des phéromones à la case (mise à jour si nécessaire) 00100 for(it = pheromones->begin(); it != end; ++it) { 00101 cell->addPheromone(*it); 00102 } 00103 } 00104 }

| void World::addCommand | ( | Worshiper * | w, | |
| unsigned int | i, | |||
| unsigned int | j | |||
| ) | [protected] |
Add a move command.
| w | the Worshiper that want to move | |
| i | the current z position of the Worshiper | |
| j | the current x position of the Worshiper |
Definition at line 106 of file World.cpp.
References _commandes, _height, _move, _width, Move::getAbsCoords(), Worshiper::getAction(), getCell(), and Cell::reachable().
Referenced by iteration().
00106 { 00107 std::pair<unsigned int, unsigned int> coord; 00108 00109 // ou doit on aller ? 00110 coord = _move->getAbsCoords(w->getAction(), i, j); 00111 // est-ce que l'on se déplace bien, que les coordonées sont valides 00112 // et que la case atteignable ? 00113 if((coord.first != i || coord.second != j) && 00114 coord.first > 0 && coord.first < _height - 1 && 00115 coord.second > 0 && coord.second < _width - 1 && 00116 getCell(coord.first, coord.second)->reachable(w)) { 00117 // si c'est le cas, alors on met en attente une commande de déplacement 00118 coord_t c = {coord.first, coord.second, i, j}; 00119 _commandes[w] = c; 00120 } 00121 }
Do all the fights on a Cell.
| cell | the cell where the fights take place |
Definition at line 146 of file World.cpp.
References _fightStrategy, Cell::addFood(), ColonyCell::getColony(), Colony::incrementFood(), ReachableCell::push(), and Fight::resolve().
Referenced by iteration().
00146 { 00147 ReachableCell *next = NULL; 00148 ColonyCell *colony = NULL; 00149 CorpseFood *dead = NULL; 00150 unsigned int food; 00151 00152 // on effectue le combat conformément à la stratégie établie 00153 food = _fightStrategy->resolve(cell); 00154 // que leurs cadavres nourrissent la terre (et leurs congénères) 00155 if(food > 0) { 00156 if(dynamic_cast<CorpseFood*>(cell)) { 00157 // on est déjà sur une CorpseFood, on ajoute juste de la nouriture. 00158 cell->addFood(food); 00159 } else { 00160 // sinon on en crée une. 00161 // la case à recouvrir doit être atteignable 00162 next = dynamic_cast<ReachableCell*>(cell); 00163 //Une CorpseFood ne doit pas recouvrir une colonie 00164 if(colony = dynamic_cast<ColonyCell*>(cell)) { 00165 // on ajoute plutôt la nouriture produite à la colonie 00166 colony->getColony()->incrementFood(food); 00167 } else if(next) { 00168 // création de la CorpseFood 00169 dead = new CorpseFood(food); 00170 if(dead != NULL) { 00171 // on l'empile par dessus l'ancienne case 00172 dead->push(next); 00173 // et on s'assure que la case retournée sera bien la nouvelle. 00174 cell = dead; 00175 } 00176 } 00177 } 00178 } 00179 00180 return cell; 00181 }
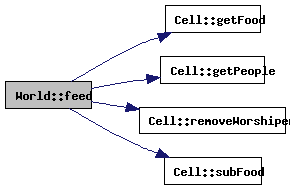
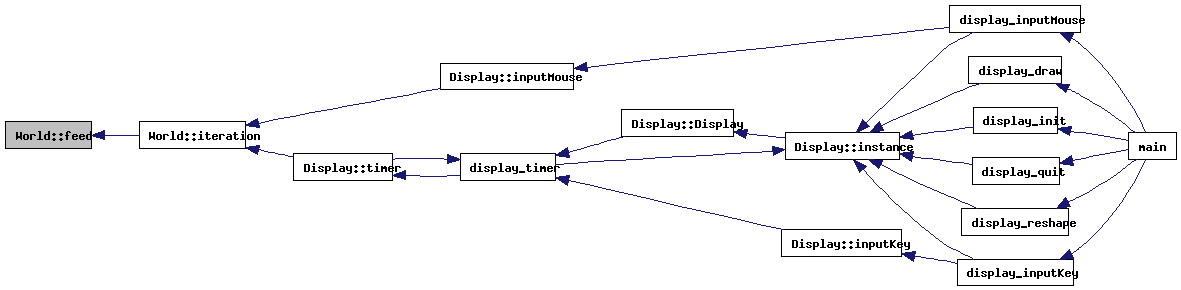
| void World::feed | ( | Cell * | cell | ) | [protected] |
Feed the Worshipers of a Cell.
| cell | the Cell where we want to feed the Worshipers in |
Definition at line 183 of file World.cpp.
References Cell::getFood(), Cell::getPeople(), Cell::removeWorshiper(), and Cell::subFood().
Referenced by iteration().
00183 { 00184 std::list<Worshiper*> *worshipers = NULL; 00185 std::list<Worshiper*>::iterator it, end; 00186 unsigned int nb_people, ratio; 00187 unsigned int needed, consumed; 00188 unsigned int food; 00189 bool full; 00190 00191 // qui est sur la case ? 00192 worshipers = cell->getPeople(); 00193 // combien de nouriture est diponible ? 00194 food = cell->getFood(); 00195 // si il y a de la nouriture et des worshipers sur la case 00196 if(food > 0 && worshipers != NULL && (nb_people = worshipers->size()) > 0) { 00197 // tout le monde n'a pas mangé à sa faim (et pour cause : personne 00198 // n'a encore mangé quoi que ce soit) 00199 full = false; 00200 // tant qu'il reste de la nouriture et que tout le monde n'est pas gavé 00201 while(food > 0 && ! full) { 00202 // on part du principe que tu le monde aura eu sa dose, les insatisfaits 00203 // n'ont qu'a faire une réclamation 00204 full = true; 00205 // on partage la nouriture en portion égales 00206 ratio = (unsigned int) (food / nb_people) + 1; 00207 // et chaque worshipers reçoit sa part 00208 end = worshipers->end(); 00209 for(it = worshipers->begin(); food > 0 && it != end; ++it) { 00210 // on calcule dabord ce dont il a besoin 00211 needed = (*it)->getCapacity() - (*it)->getFood(); 00212 // on vérifie ensuite si il pourra manger à sa faim 00213 full = !(full && needed > ratio); 00214 // on lui attribue sa part 00215 needed = (needed > ratio ? ratio : needed); 00216 // on la soustrait de la quantité totale 00217 consumed = cell->subFood(needed); 00218 // on met la quantité de nouriture disponible à jour 00219 food = cell->getFood(); 00220 // et on lui donne ce qui a été réellement soustrait 00221 (*it)->setFood((*it)->getFood() + consumed); 00222 } 00223 } 00224 } 00225 // maintenant on décrémente d'une unité la nouriture de chaque individu 00226 end = worshipers->end(); 00227 for(it = worshipers->begin(); it != end; ++it) { 00228 if(! (*it)->subFood()) { 00229 // oups... je crois qu'on est mort de faim. que c'est bête... 00230 // adieux ! 00231 delete (*it); 00232 cell->removeWorshiper(*it); 00233 --it; 00234 } 00235 } 00236 }
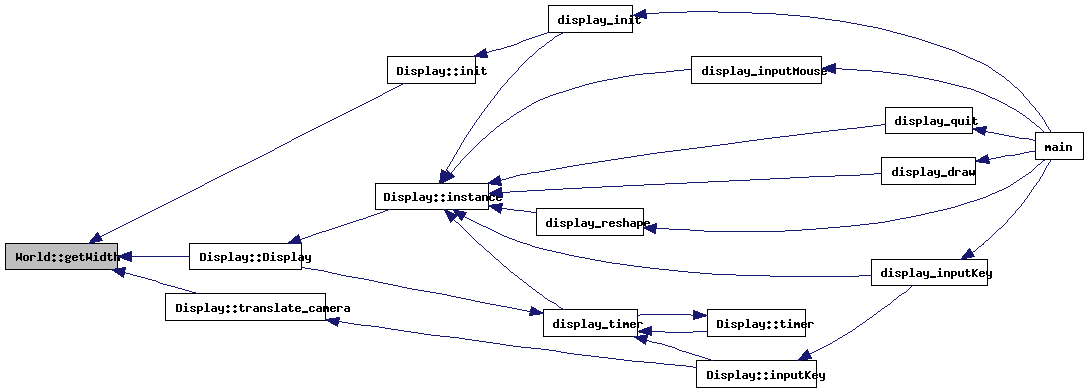
| unsigned int World::getWidth | ( | ) |
Get the World width.
Definition at line 328 of file World.cpp.
References _width.
Referenced by Display::Display(), Display::init(), and Display::translate_camera().
00328 { 00329 return _width; 00330 }
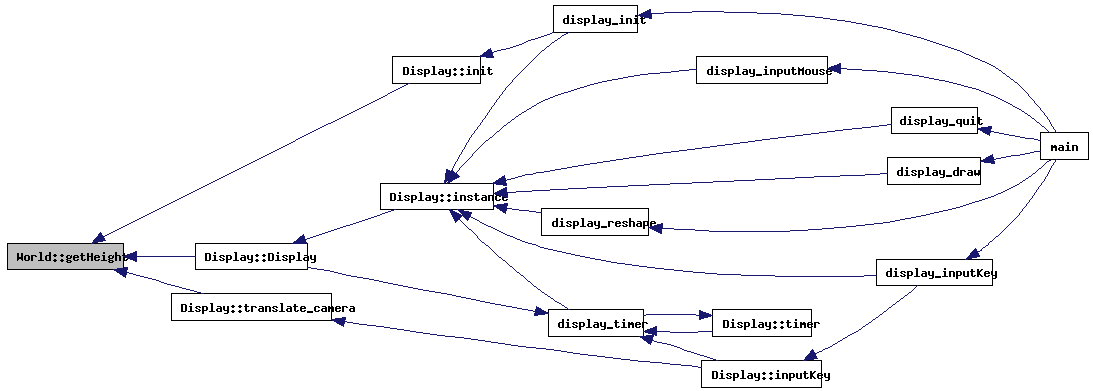
| unsigned int World::getHeight | ( | ) |
Get the World height.
Definition at line 332 of file World.cpp.
References _height.
Referenced by Display::Display(), Display::init(), and Display::translate_camera().
00332 { 00333 return _height; 00334 }
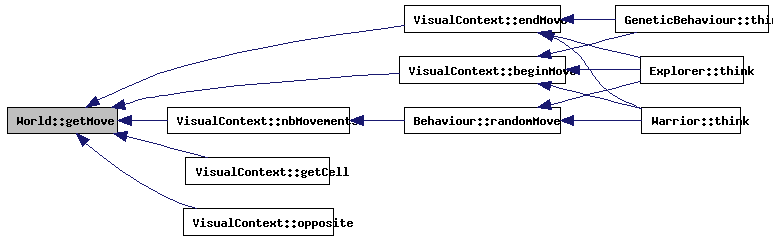
| Move * World::getMove | ( | ) | const |
Get the move responsability chain.
Definition at line 336 of file World.cpp.
References _move.
Referenced by VisualContext::beginMove(), VisualContext::endMove(), VisualContext::getCell(), VisualContext::nbMovements(), and VisualContext::opposite().
00336 { 00337 return _move; 00338 }
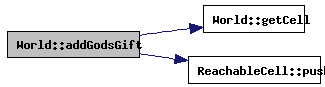
| void World::addGodsGift | ( | unsigned int | i, | |
| unsigned int | j | |||
| ) |
Add a food gift from Gods.
Definition at line 340 of file World.cpp.
References getCell(), GODS_GIFT_FOOD_VALUE, and ReachableCell::push().
Referenced by Display::inputKey().
00340 { 00341 ReachableCell *next = NULL; 00342 GodsGiftFood *gift = NULL; 00343 Cell *cell = NULL; 00344 00345 cell = getCell(i, j); 00346 next = dynamic_cast<ReachableCell*>(cell); 00347 //Une GodsGiftFood ne doit pas recouvrir une colonie 00348 if(next && ! dynamic_cast<ColonyCell*>(cell)) { 00349 gift = new GodsGiftFood(GODS_GIFT_FOOD_VALUE); 00350 if(gift != NULL) { 00351 // on l'empile par dessus l'ancienne case 00352 gift->push(next); 00353 // et on s'assure que la case retournée sera bien la nouvelle. 00354 getCell(i, j) = gift; 00355 } 00356 } 00357 }

unsigned int World::_width [protected] |
The world width
Definition at line 50 of file World.h.
Referenced by addCommand(), draw(), getCell(), getWidth(), iteration(), World(), and ~World().
unsigned int World::_height [protected] |
The world height
Definition at line 53 of file World.h.
Referenced by addCommand(), draw(), getHeight(), iteration(), World(), and ~World().
Fight* World::_fightStrategy [protected] |
std::vector<Colony*> World::_colonies [protected] |
The list of the Colonies in the World
Definition at line 59 of file World.h.
Referenced by addNewWorshipers(), and World().
std::map<Worshiper*, coord_t> World::_commandes [protected] |
The map of the move commands to do
Definition at line 62 of file World.h.
Referenced by addCommand(), and makeCommand().
Cell** World::_map [protected] |
Move* World::_move [protected] |
 1.5.4
1.5.4